> For the complete documentation index, see [llms.txt](https://docs.petoi.com/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://docs.petoi.com/chinese/kuo-zhan-mo-kuai/microbit-you-xi-shou-bing.md).
# Micro:bit 游戏手柄
这是一个基于micro:bit的游戏手柄。它包括一个摇杆和四个未定义的按钮。为了增强游戏体验,它还配有一个蜂鸣器和振动电机。它外观小巧,手感舒适,可以用来远程控制Petoi机器人。
## 硬件
{% hint style="info" %}
micro:bit V1 主板内存较小。因此,下载完整的操控功能程序到micro:bit主板,需要使用**micro:bit V2** 主板。
{% endhint %}
## 软件设置
目前游戏手柄的软件代码已在[GitHub网站](https://github.com/PetoiCamp/ESP32_Microbit_Controller)开源了。可以用来控制Petoi机器人产品 —— Bittle X, Bittle X+Arm, Nybble Q。
您可以下载程序文件([microbit-JoyStick.hex](https://raw.githubusercontent.com/PetoiCamp/ESP32_Microbit_Controller/refs/heads/main/microbit-JoyStick.hex)),并将其导入编程平台[**makecode**](https://makecode.microbit.org),如下所示:
{% hint style="info" %}
我们建议您使用Chrome浏览器。
{% endhint %}
### 将程序下载到micro:bit V2
使用USB线连接PC和micro:bit V2。
连接成功后,电脑上会识别出一个名为`MICROBIT`的盘符。
有以下两种方法可以将程序固件文件(.hex文件)下载到micro:bit V2主板中,您可以任选其中一种即可。
#### 使用电脑的文件浏览器
这种方法最简单。在文件浏览器中用鼠标点选.hex固件文件,并按住鼠标按键将其拖放到文件浏览器左侧单独的MICROBIT盘符位置,再松开鼠标按键即可。这样即可把.hex固件文件下载到microbit主板中。
#### 使用MakeCode网页
点击左下角的,选择`Connect Device`。
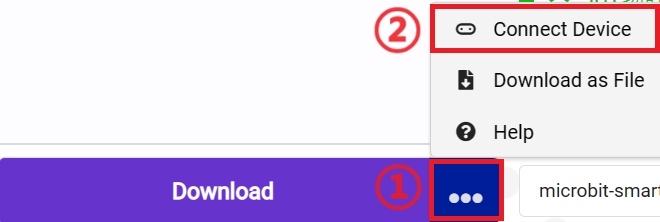
点击。
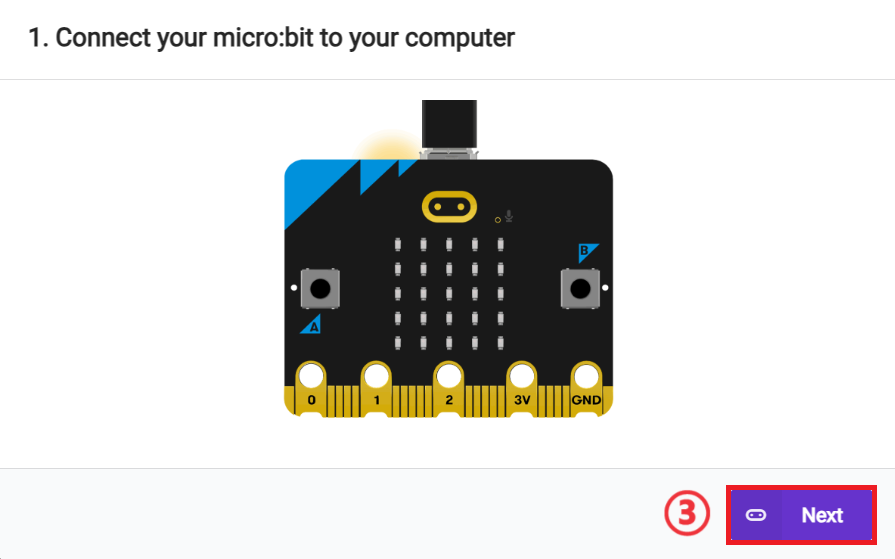
点击
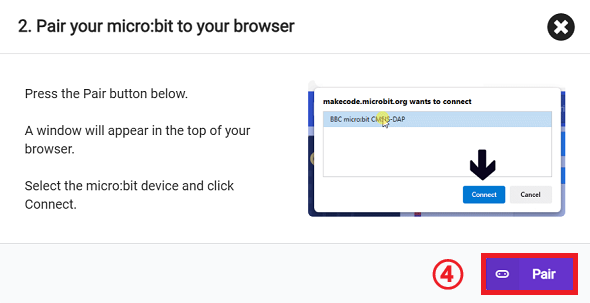
在弹出窗口选择**`BBC micro:bit CMSIS-DAP`**,然后单击“**连接**”按钮,至此,我们的micro:bit就已经连接成功。

点击**下载程序**按钮。

## 如何使用
1. 将最新的固件上传到机器人(主板类型:BiBoard)
2. 为遥控器安装2 x 7号 AAA电池,并将micro:bit V2插入遥控器。\
然后打开遥控器开关,如下图所示:\

3. 长按电池上的按钮3秒,开启机器人电源。机器人启动后,通过蓝牙模块自动连接到控制器。如果有多个遥控器和多个机器人,重复执行步骤2,3。连接规则是一对一,先到先得,已完成配对的机器人不会再次与新上电的手柄配对。
{% hint style="info" %}
**限时功能**
此功能用于在展会或科技节限制每位用户的体验时间,默认不激活。
在正常启动并连接蓝牙后,可以按住Micro:bit中间的Logo(触摸按钮),并将手柄竖立(左侧摇杆在下方),为手柄开启限时使用功能,即每隔20分钟,手柄会向机器人发送休息指令并不再响应后续操作,LED指示灯点阵动态显示沙漏图案,如下图所示:\
\
用上述同样操作可以清零倒计时,重新激活手柄。手柄会播放提示音乐,LED指示灯点阵显示沙漏倒流的动画。
限时功能一旦激活,必须断电重启手柄后才能关闭。手柄重启后,需复位(点击主板上的reset键)或断电重启机器人以再次连接。
{% endhint %}
## 控制器功能介绍
### 控制Bittle X
### 控制Bittle X+Arm(带机械臂)
### 控制Nybble Q
具体操作说明,以控制Bittle X+Arm为例:
只操控手柄左侧的摇杆,可以让机器人向不同的方向运动。
micro:bit主板上的**A键**(头部旋转),可以通过microbit自带的陀螺仪控制机械臂,操控方法是:在按下**A键**的同时前后左右倾斜手柄即可控制机械臂运动。
micro:bit主板上的**B键**,功能是控制机械臂向不同方向运动。操控方法是:先按下**B键**不要松开,再推动手柄左侧的摇杆,可以向不同的方向旋转伸出或收回机械臂。
手柄右侧的 **B键**(**身体倾斜**)**,C键**(**抛**),**D键**(**捡起**),**F键**(**放下**)都是组合操控按键,需要结合左侧的摇杆一起操控。比如,需要捡起物体时,先按下**D键**(**捡起**)不要松开,再推动手柄左侧的摇杆,可以捡起机械爪周围不同方向的物体。
手柄右侧下方的“**开合爪子**”按钮,按下机械爪打开,松开机械爪闭合。可以结合“**机械臂及身体角度**”按钮操控功能一起使用,可以抓放身体周围不同方位的物体。
---
# Agent Instructions
This documentation is published with GitBook. GitBook is the documentation platform designed so that both humans and AI agents can read, navigate, and reason over technical content effectively. Learn more at gitbook.com.
## Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter, and the optional `goal` query parameter:
```
GET https://docs.petoi.com/chinese/kuo-zhan-mo-kuai/microbit-you-xi-shou-bing.md?ask=&goal=
```
`ask` is the immediate question: it should be specific, self-contained, and written in natural language.
`goal` is optional and describes the broader end goal you are ultimately trying to accomplish on behalf of the user. GitBook uses it to tailor the answer towards what is most useful for that goal.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.