# อัปโหลด Sketch สำหรับ NyBoard
## Setup Process
ซอฟต์แวร์ OpenCat ทำงานได้ทั้งบน Nybble และ Bittle ซึ่งควบคุมโดย NyBoard ที่ใช้ ATmega328P สามารถดูเอกสารรายละเอียดเพิ่มเติมได้ที่ [*NyBoard V1\_0*](https://docs.petoi.com/thai/nyboard/nyboard-v1_0) *หรือ* [*NyBoard V1\_1*](https://docs.petoi.com/thai/nyboard/nyboard-v1_1).
{% hint style="info" %}
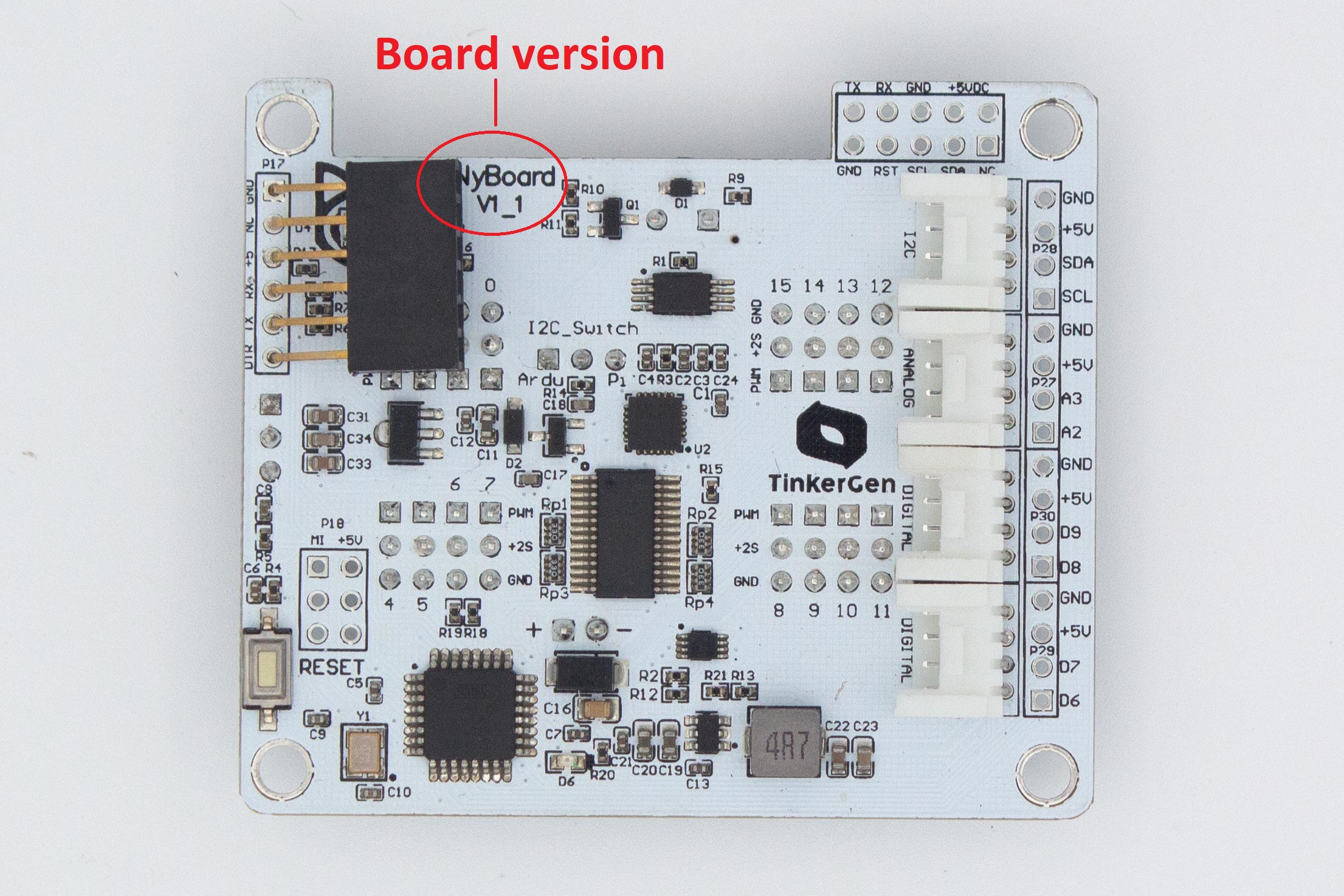
หมายเหตุ: สามารถดูเวอร์ชั่นของบอร์ดได้ที่นี่
 {% endhint %}
### เลื่อน สวิตซ์I2C (SW2) เป็น Arduino.
สวิตช์ I2C เปลี่ยนอุปกรณ์หลัก I2C (gyro/accelerometer, servo driver, external EEPROM) ตามค่าเริ่มต้น “Arduino” NyBoard ใช้ ATmega328P แบบออนบอร์ดเป็นชิปหลัก บน “RPi” NyBoard ใช้ชิปภายนอกที่เชื่อมต่อผ่านพอร์ต I2C (SDA, SCL) เป็นชิปหลัก

{% hint style="warning" %}
หมายเหตุ:
* บางครั้งหากคุณไม่สามารถผ่านขั้นตอนการบูทเครื่องได้ คุณอาจกดสวิตช์ไปที่ฝั่ง "RPi" โดยไม่ได้ตั้งใจ
* ก่อนอัปโหลดเฟิร์มแวร์ โปรดตรวจสอบว่าไม่ได้เชื่อมต่ออุปกรณ์ I2C ใดๆ กับอินเทอร์เฟซ I2C ของเมนบอร์ด มิฉะนั้น การอัปโหลดเฟิร์มแวร์จะล้มเหลว ตำแหน่งของอินเทอร์เฟซ I2C แสดงอยู่ด้านล่าง (ในช่องสีแดง)
{% endhint %}
## Quick Start Tutorial Video
{% embed url="" %}
ขั้นตอนการตั้งค่าสำหรับ Nybble เกือบจะเหมือนกัน ยกเว้นว่าคุณต้องเปลี่ยนการกำหนดโมเดลเป็น `#define NYBBLE.` อย่าลืมอ่านขั้นตอนโดยละเอียดต่อไปนี้
### Downloads and installations of Arduino IDE
{% hint style="info" %}
คุณต้องใช้ [Arduino IDE](https://www.arduino.cc/en/software) เวอร์ชั่นใหม่ล่าสุดเพื่อตั้งค่า environment ในเวอร์ชันเก่ามักจะรวบรวมไฟล์ฐานสิบหกขนาดใหญ่ขึ้นซึ่งอาจเกินขีดจำกัดของหน่วยความจำ
{% endhint %}
ถ้าเป็นบอร์ด **NyBoard V1\_\* เวอร์ชั่นใดก็ตามสามารถเลือกเป็น** **Arduino Uno ได้เลย**

{% hint style="warning" %}
เฉพาะในกรณีที่ bootloader ของ NyBoard พัง ซึ่งไม่น่าจะเกิดขึ้น
### Burn the bootloader (ไม่จำเป็นสำหรับการใช้งานปกติ)
● [What is a bootloader?](https://www.arduino.cc/en/Hacking/Bootloader?from=Tutorial.Bootloader)
NyBoard ทุกเครื่องต้องผ่านการตรวจสอบการทำงานก่อนจัดส่ง ดังนั้นพวกเขาจึงควรติดตั้ง bootloader ที่เข้ากันได้ไว้แล้ว อย่างไรก็ตาม ในบางกรณี bootloader อาจพัง จากนั้นคุณจะไม่สามารถอัปโหลดภาพร่างผ่าน Arduino IDE ได้
หากคุณไม่สามารถอัปโหลด sketch ของคุณได้ไม่ได้แปลว่าเป็นเพราะ bootloader เสมอไป:
* บางครั้งบอร์ด USB ของคุณจะตรวจจับกระแสไฟขนาดใหญ่จากอุปกรณ์และปิดใช้งานบริการ USB ทั้งหมด คุณจะต้อง restart บริการ USB ของคุณใหม่ หรือแม้แต่ reboot เครื่องคอมพิวเตอร์ของคุณ
* คุณต้องติดตั้ง driver สำหรับ FTDI USB 2.0 ไปยังตัวอัปโหลด UART
* คุณไม่ได้เลือกพอร์ตที่ถูกต้อง
* การเชื่อมต่อไม่ดี
* โชคร้าย. พรุ่งนี้ลองใหม่อีกวัน!
หากคุณตัดสินใจที่จะเบิร์น bootloader ใหม่:
* ด้วย **NyBoard V1\_\*** คุณสามารถเลือก **Arduino Uno** ภายใต้เมนูเครื่องมือของ **Arduino IDE**

* เลือก ISP ของคุณ (ภายใน System Programmer) ยอดนิยม 2 ตัว: **USBtinyISP** หรือ **Arduino as ISP** [Arduino as ISP](https://www.arduino.cc/en/Tutorial/ArduinoISP)!
* เชื่อมต่อ programmer กับพอร์ต SPI บน NyBoard สังเกตทิศทางเมื่อเชื่อมต่อ ตรวจสอบให้แน่ใจว่าพวกเขาได้รับการติดต่อที่ดี
* เบิร์น bootloader หากนี่เป็นครั้งแรกที่คุณทำเช่นนี้ ให้รอจนกว่าแถบเปอร์เซ็นต์จะถึง 100% และไม่มีข้อความปรากฏขึ้นอีกเป็นเวลาหนึ่งนาที
{% endhint %}
### เชื่อมต่อตัวอัปโหลด (บางครั้งเรียกว่า programmer )
{% hint style="info" %}
ขั้นตอนนี้ไม่จำเป็นต้องติดตั้ง NyBoard บนหุ่นยนต์
{% endhint %}
สำหรับขั้นตอนเฉพาะ โปรดดูส่วนเชื่อมต่อ NyBoard ใน USB uploader module [Connect NyBoard section](https://docs.petoi.com/communication-modules/usb-downloader-ch340c#connect-nyboard)
### เชื่อมต่อตัวอัปโหลด Bluetooth (optional)
สำหรับขั้นตอนเฉพาะ โปรดดูที่ส่วนเชื่อมต่อ NyBoard ใน Dual-Mode Bluetooth Module [Connect NyBoard section](https://docs.petoi.com/communication-modules/dual-mode-bluetooth#connection-with-nyboard)
{% hint style="warning" %}
บน Mac บลูทูธอาจขาดการเชื่อมต่อหลังจากอัปโหลดหลายครั้ง ในกรณีดังกล่าว ให้ลบการเชื่อมต่อและเชื่อมต่อใหม่เพื่อให้ฟังก์ชันทำงานต่อ
{% endhint %}
{% hint style="warning" %}
หาก Bluetooth dongle ไม่เจออยู่ในชุดหุ่นยนต์โดย Seeed Studio หรือ partner ของเราโปรดส่งอีเมลถึง เพื่อทราบข้อมูลเพิ่มเติม
{% endhint %}
### ดาวน์โหลด OpenCat แพ็คเกจ
{% hint style="info" %}
เราอัปเดต code อย่างต่อเนื่องเป็น Open-source project คุณสามารถติดดาวและติดตาม[GitHub repository](https://github.com/PetoiCamp/OpenCat) เพื่อรับฟีเจอร์ใหม่ล่าสุดและการแก้ไขข้อบกพร่อง คุณยังสามารถแบ่งปัน code ของคุณกับผู้ใช้ OpenCat ทั่วโลก
{% endhint %}
* ดาวน์โหลด OpenCat repo เวอร์ชั่นล่าสุดจาก GitHub: . จะดีกว่าถ้าคุณใช้คุณสมบัติการควบคุมเวอร์ชันของ GitHub มิฉะนั้น ตรวจสอบให้แน่ใจว่าคุณดาวน์โหลดทั้งโฟลเดอร์ OpenCat ทุกครั้ง codeทั้งหมดต้องเป็นเวอร์ชันเดียวกันจึงจะทำงานร่วมกันได้
* หากคุณดาวน์โหลดไฟล์ Zip ของ code คุณจะได้รับ **OpenCat-main** โฟลเดอร์หลังจาก unzip คุณต้องเปลี่ยนชื่อเป็น **OpenCat** ก่อนเปิด **OpenCat.ino** เพื่อให้ชื่อทั้งสองตรงกัน
{% hint style="warning" %}
ไม่ว่าคุณจะบันทึกโฟลเดอร์ไว้ที่ใด โครงสร้างไฟล์ควรเป็น:

{% endhint %}
* มี code ที่ชื่อว่า **testX.ino** หลายไฟล์ในโฟลเดอร์ **ModuleTests** คุณสามารถอัปโหลดเพื่อทดสอบบางโมดูลแยกกันได้ เปิด **testX.ino** ใดๆ ที่มีคำนำหน้าว่า “test” (แนะนำให้ใช้ **testBuzzer.ino** เป็น sketch ทดสอบแรกของคุณ)
* เปิด serial monitor และตั้งค่า baud rate บน NyBoard V1\_\* ให้เลือกบอร์ดเป็น **Arduino Uno** และตั้งค่า **baud rate** เป็น 115200 ทั้งใน code และ serial monitor
* Compile code ไม่ควรมีข้อความแสดงข้อผิดพลาด เมืออัปโหลด sketch ไปยังบอร์ดของคุณและคุณจะเห็น LED Tx และ Rx กะพริบถี่ๆ เมื่อหยุดกะพริบ ข้อความควรปรากฏบน serial monitor
### Upload
ในการกำหนดค่าบอร์ด โปรดทำตามขั้นตอนเหล่านี้
#### 1. กำหนดค่าประเภทหุ่นยนต์และรุ่นของบอร์ด
เปิดไฟล์ OpenCat.ino และเลือกเวอร์ชันของหุ่นยนต์และบอร์ดของคุณ ตัวอย่างเช่น
```cpp
#define BITTLE //Petoi 9 DOF robot dog: 1x on head + 8x on leg
//#define NYBBLE //Petoi 11 DOF robot cat: 2x on head + 1x on tail + 8x on leg
//#define NyBoard_V0_1
//#define NyBoard_V0_2
#define NyBoard_V1_0
//#define NyBoard_V1_1
```
{% hint style="info" %}
สัญลักษณ์ **//** หมายถึงการปิดการใช้งานบรรทัดของ code และเปลี่ยนเป็นความคิดเห็น ตรวจสอบให้แน่ใจว่าคุณเปิดใช้งานตัวเลือกคู่ขนานเพียงบรรทัดเดียว
{% endhint %}
#### 2.ตั้งค่า configuration mode
คอมเมนท์ในส่วน `#define MAIN_SKETCH` เพื่อให้โค้ดเปลี่ยนโหมดการกำหนดค่าบอร์ด อัปโหลดและปฏิบัติตาม serial prompts เพื่อดำเนินการต่อดังตัวอย่างด้านล่าง
```cpp
// #define MAIN_SKETCH
```
{% hint style="info" %}
หากคุณเปิดใช้งาน`#define AUTO_INIT`โปรแกรมจะตั้งค่าโดยอัตโนมัติโดยไม่ต้องแจ้งให้ทราบล่วงหน้า จะไม่รีเซ็ตออฟเซ็ตของข้อต่อ แต่ปรับเทียบ IMU
{% endhint %}
#### 3. เสียบตัวอัพโหลด USB เข้ากับคอมพิวเตอร์ของคุณ
ติดตั้ง [the driver](https://docs.petoi.com/communication-modules/usb-downloader-ch340c#the-drivers) หากไม่พบพอร์ต USB ภายใต้ Arduino -> Tools -> Port
{% endhint %}
### เลื่อน สวิตซ์I2C (SW2) เป็น Arduino.
สวิตช์ I2C เปลี่ยนอุปกรณ์หลัก I2C (gyro/accelerometer, servo driver, external EEPROM) ตามค่าเริ่มต้น “Arduino” NyBoard ใช้ ATmega328P แบบออนบอร์ดเป็นชิปหลัก บน “RPi” NyBoard ใช้ชิปภายนอกที่เชื่อมต่อผ่านพอร์ต I2C (SDA, SCL) เป็นชิปหลัก

{% hint style="warning" %}
หมายเหตุ:
* บางครั้งหากคุณไม่สามารถผ่านขั้นตอนการบูทเครื่องได้ คุณอาจกดสวิตช์ไปที่ฝั่ง "RPi" โดยไม่ได้ตั้งใจ
* ก่อนอัปโหลดเฟิร์มแวร์ โปรดตรวจสอบว่าไม่ได้เชื่อมต่ออุปกรณ์ I2C ใดๆ กับอินเทอร์เฟซ I2C ของเมนบอร์ด มิฉะนั้น การอัปโหลดเฟิร์มแวร์จะล้มเหลว ตำแหน่งของอินเทอร์เฟซ I2C แสดงอยู่ด้านล่าง (ในช่องสีแดง)
{% endhint %}
## Quick Start Tutorial Video
{% embed url="" %}
ขั้นตอนการตั้งค่าสำหรับ Nybble เกือบจะเหมือนกัน ยกเว้นว่าคุณต้องเปลี่ยนการกำหนดโมเดลเป็น `#define NYBBLE.` อย่าลืมอ่านขั้นตอนโดยละเอียดต่อไปนี้
### Downloads and installations of Arduino IDE
{% hint style="info" %}
คุณต้องใช้ [Arduino IDE](https://www.arduino.cc/en/software) เวอร์ชั่นใหม่ล่าสุดเพื่อตั้งค่า environment ในเวอร์ชันเก่ามักจะรวบรวมไฟล์ฐานสิบหกขนาดใหญ่ขึ้นซึ่งอาจเกินขีดจำกัดของหน่วยความจำ
{% endhint %}
ถ้าเป็นบอร์ด **NyBoard V1\_\* เวอร์ชั่นใดก็ตามสามารถเลือกเป็น** **Arduino Uno ได้เลย**

{% hint style="warning" %}
เฉพาะในกรณีที่ bootloader ของ NyBoard พัง ซึ่งไม่น่าจะเกิดขึ้น
### Burn the bootloader (ไม่จำเป็นสำหรับการใช้งานปกติ)
● [What is a bootloader?](https://www.arduino.cc/en/Hacking/Bootloader?from=Tutorial.Bootloader)
NyBoard ทุกเครื่องต้องผ่านการตรวจสอบการทำงานก่อนจัดส่ง ดังนั้นพวกเขาจึงควรติดตั้ง bootloader ที่เข้ากันได้ไว้แล้ว อย่างไรก็ตาม ในบางกรณี bootloader อาจพัง จากนั้นคุณจะไม่สามารถอัปโหลดภาพร่างผ่าน Arduino IDE ได้
หากคุณไม่สามารถอัปโหลด sketch ของคุณได้ไม่ได้แปลว่าเป็นเพราะ bootloader เสมอไป:
* บางครั้งบอร์ด USB ของคุณจะตรวจจับกระแสไฟขนาดใหญ่จากอุปกรณ์และปิดใช้งานบริการ USB ทั้งหมด คุณจะต้อง restart บริการ USB ของคุณใหม่ หรือแม้แต่ reboot เครื่องคอมพิวเตอร์ของคุณ
* คุณต้องติดตั้ง driver สำหรับ FTDI USB 2.0 ไปยังตัวอัปโหลด UART
* คุณไม่ได้เลือกพอร์ตที่ถูกต้อง
* การเชื่อมต่อไม่ดี
* โชคร้าย. พรุ่งนี้ลองใหม่อีกวัน!
หากคุณตัดสินใจที่จะเบิร์น bootloader ใหม่:
* ด้วย **NyBoard V1\_\*** คุณสามารถเลือก **Arduino Uno** ภายใต้เมนูเครื่องมือของ **Arduino IDE**

* เลือก ISP ของคุณ (ภายใน System Programmer) ยอดนิยม 2 ตัว: **USBtinyISP** หรือ **Arduino as ISP** [Arduino as ISP](https://www.arduino.cc/en/Tutorial/ArduinoISP)!
* เชื่อมต่อ programmer กับพอร์ต SPI บน NyBoard สังเกตทิศทางเมื่อเชื่อมต่อ ตรวจสอบให้แน่ใจว่าพวกเขาได้รับการติดต่อที่ดี
* เบิร์น bootloader หากนี่เป็นครั้งแรกที่คุณทำเช่นนี้ ให้รอจนกว่าแถบเปอร์เซ็นต์จะถึง 100% และไม่มีข้อความปรากฏขึ้นอีกเป็นเวลาหนึ่งนาที
{% endhint %}
### เชื่อมต่อตัวอัปโหลด (บางครั้งเรียกว่า programmer )
{% hint style="info" %}
ขั้นตอนนี้ไม่จำเป็นต้องติดตั้ง NyBoard บนหุ่นยนต์
{% endhint %}
สำหรับขั้นตอนเฉพาะ โปรดดูส่วนเชื่อมต่อ NyBoard ใน USB uploader module [Connect NyBoard section](https://docs.petoi.com/communication-modules/usb-downloader-ch340c#connect-nyboard)
### เชื่อมต่อตัวอัปโหลด Bluetooth (optional)
สำหรับขั้นตอนเฉพาะ โปรดดูที่ส่วนเชื่อมต่อ NyBoard ใน Dual-Mode Bluetooth Module [Connect NyBoard section](https://docs.petoi.com/communication-modules/dual-mode-bluetooth#connection-with-nyboard)
{% hint style="warning" %}
บน Mac บลูทูธอาจขาดการเชื่อมต่อหลังจากอัปโหลดหลายครั้ง ในกรณีดังกล่าว ให้ลบการเชื่อมต่อและเชื่อมต่อใหม่เพื่อให้ฟังก์ชันทำงานต่อ
{% endhint %}
{% hint style="warning" %}
หาก Bluetooth dongle ไม่เจออยู่ในชุดหุ่นยนต์โดย Seeed Studio หรือ partner ของเราโปรดส่งอีเมลถึง เพื่อทราบข้อมูลเพิ่มเติม
{% endhint %}
### ดาวน์โหลด OpenCat แพ็คเกจ
{% hint style="info" %}
เราอัปเดต code อย่างต่อเนื่องเป็น Open-source project คุณสามารถติดดาวและติดตาม[GitHub repository](https://github.com/PetoiCamp/OpenCat) เพื่อรับฟีเจอร์ใหม่ล่าสุดและการแก้ไขข้อบกพร่อง คุณยังสามารถแบ่งปัน code ของคุณกับผู้ใช้ OpenCat ทั่วโลก
{% endhint %}
* ดาวน์โหลด OpenCat repo เวอร์ชั่นล่าสุดจาก GitHub: . จะดีกว่าถ้าคุณใช้คุณสมบัติการควบคุมเวอร์ชันของ GitHub มิฉะนั้น ตรวจสอบให้แน่ใจว่าคุณดาวน์โหลดทั้งโฟลเดอร์ OpenCat ทุกครั้ง codeทั้งหมดต้องเป็นเวอร์ชันเดียวกันจึงจะทำงานร่วมกันได้
* หากคุณดาวน์โหลดไฟล์ Zip ของ code คุณจะได้รับ **OpenCat-main** โฟลเดอร์หลังจาก unzip คุณต้องเปลี่ยนชื่อเป็น **OpenCat** ก่อนเปิด **OpenCat.ino** เพื่อให้ชื่อทั้งสองตรงกัน
{% hint style="warning" %}
ไม่ว่าคุณจะบันทึกโฟลเดอร์ไว้ที่ใด โครงสร้างไฟล์ควรเป็น:

{% endhint %}
* มี code ที่ชื่อว่า **testX.ino** หลายไฟล์ในโฟลเดอร์ **ModuleTests** คุณสามารถอัปโหลดเพื่อทดสอบบางโมดูลแยกกันได้ เปิด **testX.ino** ใดๆ ที่มีคำนำหน้าว่า “test” (แนะนำให้ใช้ **testBuzzer.ino** เป็น sketch ทดสอบแรกของคุณ)
* เปิด serial monitor และตั้งค่า baud rate บน NyBoard V1\_\* ให้เลือกบอร์ดเป็น **Arduino Uno** และตั้งค่า **baud rate** เป็น 115200 ทั้งใน code และ serial monitor
* Compile code ไม่ควรมีข้อความแสดงข้อผิดพลาด เมืออัปโหลด sketch ไปยังบอร์ดของคุณและคุณจะเห็น LED Tx และ Rx กะพริบถี่ๆ เมื่อหยุดกะพริบ ข้อความควรปรากฏบน serial monitor
### Upload
ในการกำหนดค่าบอร์ด โปรดทำตามขั้นตอนเหล่านี้
#### 1. กำหนดค่าประเภทหุ่นยนต์และรุ่นของบอร์ด
เปิดไฟล์ OpenCat.ino และเลือกเวอร์ชันของหุ่นยนต์และบอร์ดของคุณ ตัวอย่างเช่น
```cpp
#define BITTLE //Petoi 9 DOF robot dog: 1x on head + 8x on leg
//#define NYBBLE //Petoi 11 DOF robot cat: 2x on head + 1x on tail + 8x on leg
//#define NyBoard_V0_1
//#define NyBoard_V0_2
#define NyBoard_V1_0
//#define NyBoard_V1_1
```
{% hint style="info" %}
สัญลักษณ์ **//** หมายถึงการปิดการใช้งานบรรทัดของ code และเปลี่ยนเป็นความคิดเห็น ตรวจสอบให้แน่ใจว่าคุณเปิดใช้งานตัวเลือกคู่ขนานเพียงบรรทัดเดียว
{% endhint %}
#### 2.ตั้งค่า configuration mode
คอมเมนท์ในส่วน `#define MAIN_SKETCH` เพื่อให้โค้ดเปลี่ยนโหมดการกำหนดค่าบอร์ด อัปโหลดและปฏิบัติตาม serial prompts เพื่อดำเนินการต่อดังตัวอย่างด้านล่าง
```cpp
// #define MAIN_SKETCH
```
{% hint style="info" %}
หากคุณเปิดใช้งาน`#define AUTO_INIT`โปรแกรมจะตั้งค่าโดยอัตโนมัติโดยไม่ต้องแจ้งให้ทราบล่วงหน้า จะไม่รีเซ็ตออฟเซ็ตของข้อต่อ แต่ปรับเทียบ IMU
{% endhint %}
#### 3. เสียบตัวอัพโหลด USB เข้ากับคอมพิวเตอร์ของคุณ
ติดตั้ง [the driver](https://docs.petoi.com/communication-modules/usb-downloader-ch340c#the-drivers) หากไม่พบพอร์ต USB ภายใต้ Arduino -> Tools -> Port

#### 4. เสียบตัวอัปโหลด USB เข้ากับ NyBoard
สำหรับขั้นตอนเฉพาะโปรดดูส่วนเชื่อมต่อ [Connect NyBoard section](https://docs.petoi.com/communication-modules/usb-downloader-ch340c#connect-nyboard) ใน USB uploader module
#### 5. อัปโหลด configuration mode sketch
กดปุ่มอัปโหลด

#### 6. เปิด serial monitor
คุณสามารถหาปุ่มนี้ได้ภายใต้เครื่องมือ **Tools** หรือที่มุมบนขวาของ IDE


ตั้งค่า serial monitor เป็น **No line ending** และ **baud** **rate** 115200
#### 7.รีเซ็ตออฟเซ็ตของข้อต่อ
The serial prompts:
```
Reset joint offsets? (Y/n):
```
ป้อน 'Y' และกด Enter หากคุณต้องการรีเซ็ตออฟเซ็ตของข้อต่อทั้งหมดเป็น 0
โปรแกรมจะทำการรีเซ็ต จากนั้นอัปเดต constants และ instinctive skills ในหน่วยความจำ
{% hint style="warning" %}
คุณต้องป้อน 'Y' หรือ 'n' เพื่อผ่านขั้นตอนนี้ มิฉะนั้น parameters รวมถึง skill data จะไม่ได้รับการอัพเดตบนบอร์ด
{% endhint %}
#### 8. IMU (Inertial Measurement Unit) calibration
The serial prompts:
```
Calibrate the IMU? (Y/n):
```
ป้อน 'Y' และกด Enter หากคุณไม่เคยปรับเทียบ IMU หรือต้องการทำการปรับเทียบใหม่
วางหุ่นยนต์ราบบนโต๊ะและอย่าแตะต้อง หุ่นยนต์จะส่งเสียงบี๊บยาวหกครั้งเพื่อให้คุณมีเวลาเพียงพอ จากนั้นจะอ่านข้อมูลเซ็นเซอร์หลายร้อยรายการและบันทึกค่าชดเชย จะส่งเสียงบี๊บเมื่อการปรับเทียบเสร็จสิ้น
เมื่อ serial monitor แสดง "Ready!" คุณสามารถปิด serial monitor เพื่อทำขั้นตอนถัดไป
#### 9. Calibrate the servo controller chip PCA9685
มีขั้นตอนเพิ่มเติมในการ Calibrate servo driver หลังจากการ calibrate IMU
```
Optional: Connect PWM 3 -> Grove pin A3 to calibrate PCA9685
```
คุณสามารถ calibrate servo controller (PCA9685 chip) เพื่อให้สัญญาณมุมแม่นยำยิ่งขึ้น ใช้สายจัมเปอร์แบบสั้นเพื่อเชื่อมต่อ PWM pin3 (pin สัญญาณของ pin เซอร์โวตัวใดตัวหนึ่ง) และ Grove pin A3
 โปรแกรมจะวัดความกว้างของสัญญาณและ calibrate ชิปโดยอัตโนมัติหลังจากอ่านค่าที่เหมือนกันสามครั้งติดต่อกัน ค่าชดเชยการ calibrate จะถูกบันทึกไว้ในบอร์ดสำหรับการบูทครั้งต่อไป จากนั้นคุณสามารถไปยังขั้นตอนต่อไปได้
{% hint style="warning" %}
หากเซอร์โวตัวใดตัวหนึ่งหยุดทำงานแต่สามารถทำงานต่อได้หลังจากเปิดเซอร์โวใหม่ อาจเป็นเพราะสัญญาณ driver ไม่แม่นยำ ขั้นตอนนี้ไม่สามารถข้ามได้
{% endhint %}
#### 10. อัปโหลด sketch ของฟังก์ชันหลัก
ยกเลิก comment `#define MAIN_SKETCH`เพื่อให้ใช้งานได้ code จะกลายเป็นโปรแกรมปกติสำหรับการทำงานหลัก จากนั้นอัปโหลด code
```cpp
#define MAIN_SKETCH
```
เปิด serial monitor เมื่อ serial monitor แสดง " Ready! " หุ่นยนต์ก็พร้อมที่จะรับคำสั่งถัดไปของคุณ
#### 11. The module macro in the code
Code เริ่มต้นทำงานในโหมดมาตรฐาน หากคุณมีโมดูลที่ขยายได้บางโมดูล คุณอาจยกเลิกการแสดงความคิดเห็น macro definition ของโมดูลนั้นๆ จะปิดใช้งานรหัส Gyro เพื่อประหยัดพื้นที่ในการเขียนโปรแกรมและเปิดใช้งานการสาธิตของโมดูล
โปรแกรมจะวัดความกว้างของสัญญาณและ calibrate ชิปโดยอัตโนมัติหลังจากอ่านค่าที่เหมือนกันสามครั้งติดต่อกัน ค่าชดเชยการ calibrate จะถูกบันทึกไว้ในบอร์ดสำหรับการบูทครั้งต่อไป จากนั้นคุณสามารถไปยังขั้นตอนต่อไปได้
{% hint style="warning" %}
หากเซอร์โวตัวใดตัวหนึ่งหยุดทำงานแต่สามารถทำงานต่อได้หลังจากเปิดเซอร์โวใหม่ อาจเป็นเพราะสัญญาณ driver ไม่แม่นยำ ขั้นตอนนี้ไม่สามารถข้ามได้
{% endhint %}
#### 10. อัปโหลด sketch ของฟังก์ชันหลัก
ยกเลิก comment `#define MAIN_SKETCH`เพื่อให้ใช้งานได้ code จะกลายเป็นโปรแกรมปกติสำหรับการทำงานหลัก จากนั้นอัปโหลด code
```cpp
#define MAIN_SKETCH
```
เปิด serial monitor เมื่อ serial monitor แสดง " Ready! " หุ่นยนต์ก็พร้อมที่จะรับคำสั่งถัดไปของคุณ
#### 11. The module macro in the code
Code เริ่มต้นทำงานในโหมดมาตรฐาน หากคุณมีโมดูลที่ขยายได้บางโมดูล คุณอาจยกเลิกการแสดงความคิดเห็น macro definition ของโมดูลนั้นๆ จะปิดใช้งานรหัส Gyro เพื่อประหยัดพื้นที่ในการเขียนโปรแกรมและเปิดใช้งานการสาธิตของโมดูล
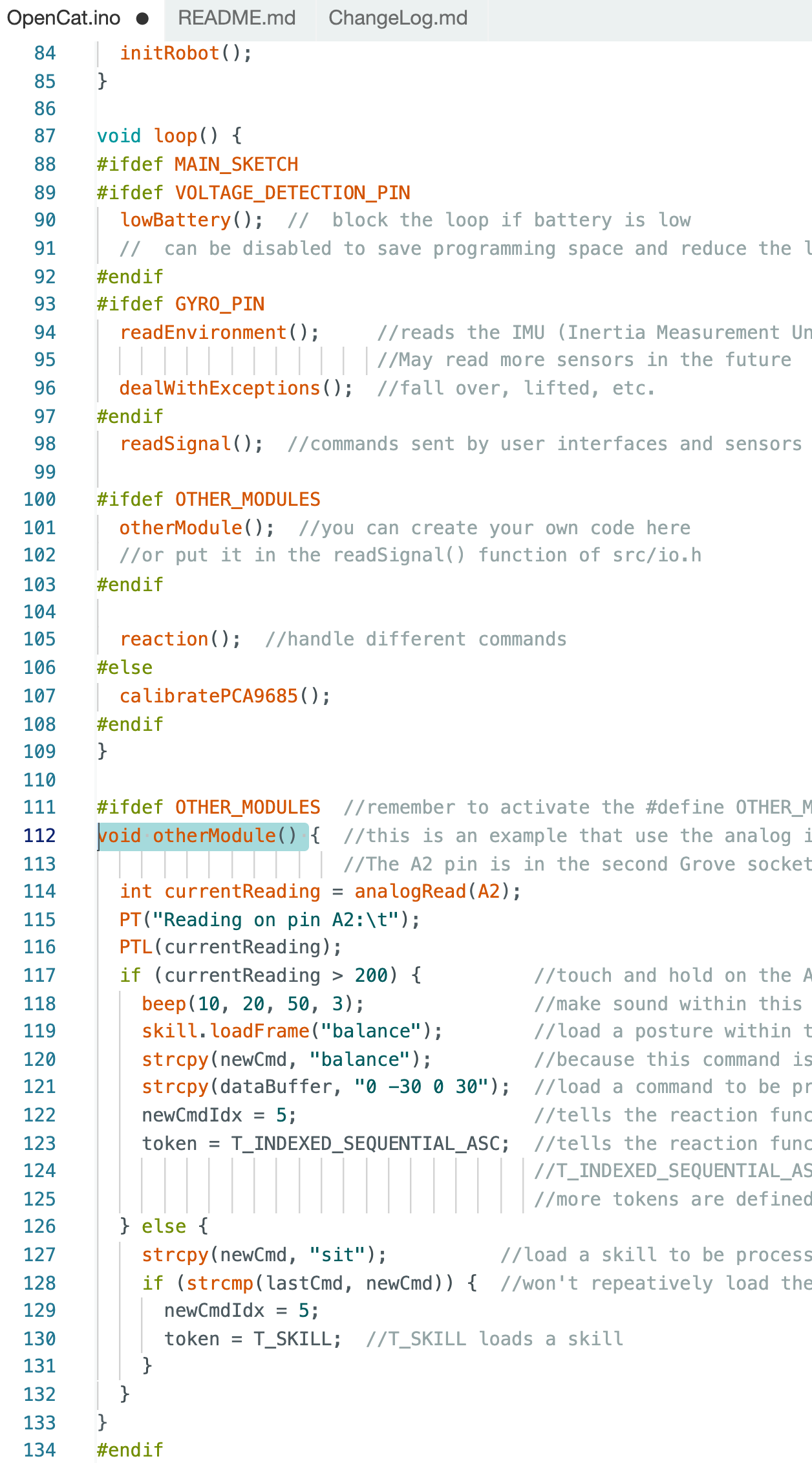
 ใน official modules ถูกกำหนดไว้ในไฟล์ส่วนหัวแยกต่างหากใน **OpenCat/src/** คุณสามารถค้นหาได้ใน **OpenCat/src/io.h -> readSignal()** ลักษณะการทำงานของ **OTHER\_MODULES** กำหนดไว้ใน **OpenCat/OpenCat.ino -> otherModule()** คุณสามารถศึกษาโค้ดตัวอย่างเพื่อเขียนฟังก์ชันของคุณเองได้
ใน official modules ถูกกำหนดไว้ในไฟล์ส่วนหัวแยกต่างหากใน **OpenCat/src/** คุณสามารถค้นหาได้ใน **OpenCat/src/io.h -> readSignal()** ลักษณะการทำงานของ **OTHER\_MODULES** กำหนดไว้ใน **OpenCat/OpenCat.ino -> otherModule()** คุณสามารถศึกษาโค้ดตัวอย่างเพื่อเขียนฟังก์ชันของคุณเองได้
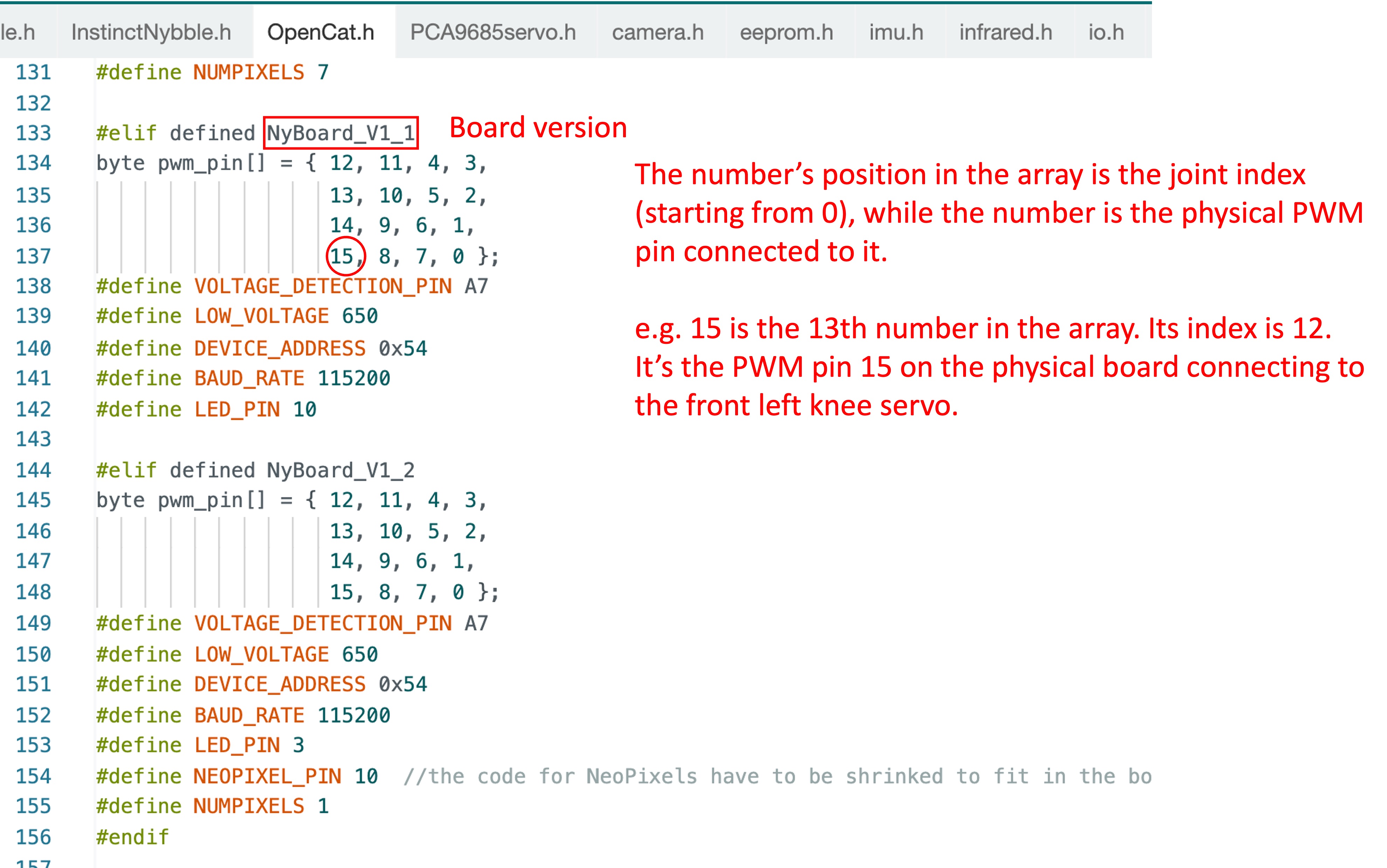
 #### 12. Modify the "joint - pin" mapping
ในบางกรณี คุณอาจต้องการปรับเปลี่ยนการ mapping ของ "pin ข้อต่อ" ของหุ่นยนต์ คุณสามารถแก้ไขได้ใน **OpenCat/src/OpenCat.h** ตรวจสอบให้แน่ใจว่าคุณกำลังแก้ไขบล็อกโค้ดที่สอดคล้องกับเวอร์ชันของบอร์ดที่จุดเริ่มต้นของ **OpenCat.ino** หลังจากแก้ไข อย่าลืมบันทึกการเปลี่ยนแปลงและทำขั้นตอนการอัปโหลดซ้ำตั้งแต่ขั้นตอนที่ 2
#### 12. Modify the "joint - pin" mapping
ในบางกรณี คุณอาจต้องการปรับเปลี่ยนการ mapping ของ "pin ข้อต่อ" ของหุ่นยนต์ คุณสามารถแก้ไขได้ใน **OpenCat/src/OpenCat.h** ตรวจสอบให้แน่ใจว่าคุณกำลังแก้ไขบล็อกโค้ดที่สอดคล้องกับเวอร์ชันของบอร์ดที่จุดเริ่มต้นของ **OpenCat.ino** หลังจากแก้ไข อย่าลืมบันทึกการเปลี่ยนแปลงและทำขั้นตอนการอัปโหลดซ้ำตั้งแต่ขั้นตอนที่ 2